什么是機械臂?
從機器人角度來說,機械手或機械臂是一種機械裝置,通常是可編程的,其功能與人的手臂相似。手臂可以是機械裝置的總和,也可以是復雜的機器人的一部分。
從工業角度說,機械手是一種輔助搬運設備,用于替代人工抓取、搬運和裝卸物料,這些物品因為太重,太熱,太大或以其他方式使單個工人無法手動搬運。
綜合歸納來說,機械手臂是指能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。

機械臂的用途是什么?
由于機械手的設計便于將負載從一個位置轉移到另一個位置,而這些負載對于工人來說太重或不適合抓取,因此它們主要用于操作物料,而無需操作員直接進行物理接觸。
最初,它是用于搬運具有放射性或生物危害性的材料,或在人工難以接近的地方使用。隨著機器人科技技術的發展,它已被廣泛應用于包括焊接機器人,機器人手術和太空在內的各種應用。它是一種類似手臂的機制,能以多個自由度抓取和移動物體。
相較于簡單的垂直吊運工具(起重機,起重機等),機械臂可以伸入到狹窄的空間并取出工件。一個很好的例子是從沖壓機上取下被壓制后的大型工件,并迅速精準地將它們放在托盤上。在焊接領域,焊接機器人的應用,能夠穩定和提高焊接質量,保證其均一性,同時也改善工人勞動強度,避免其在有害環境下工作。
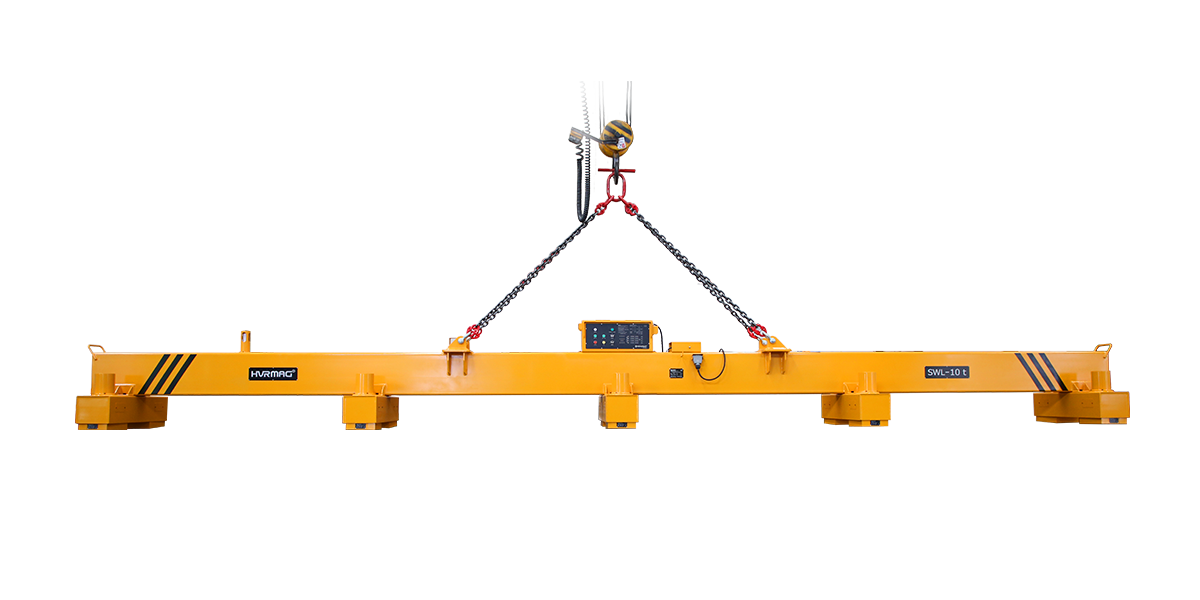
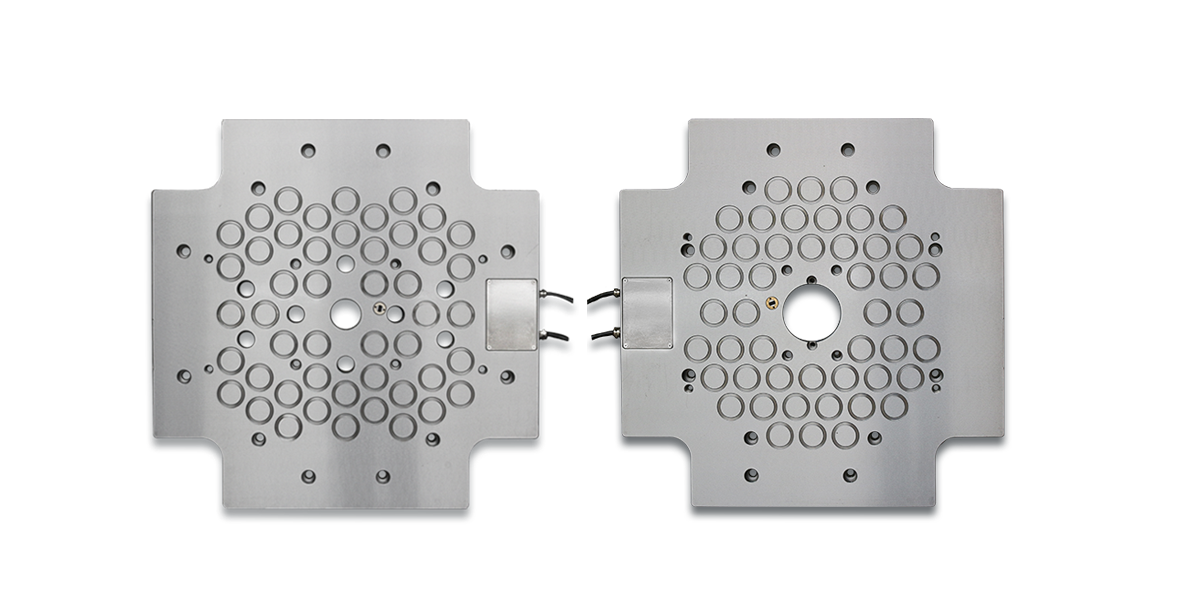
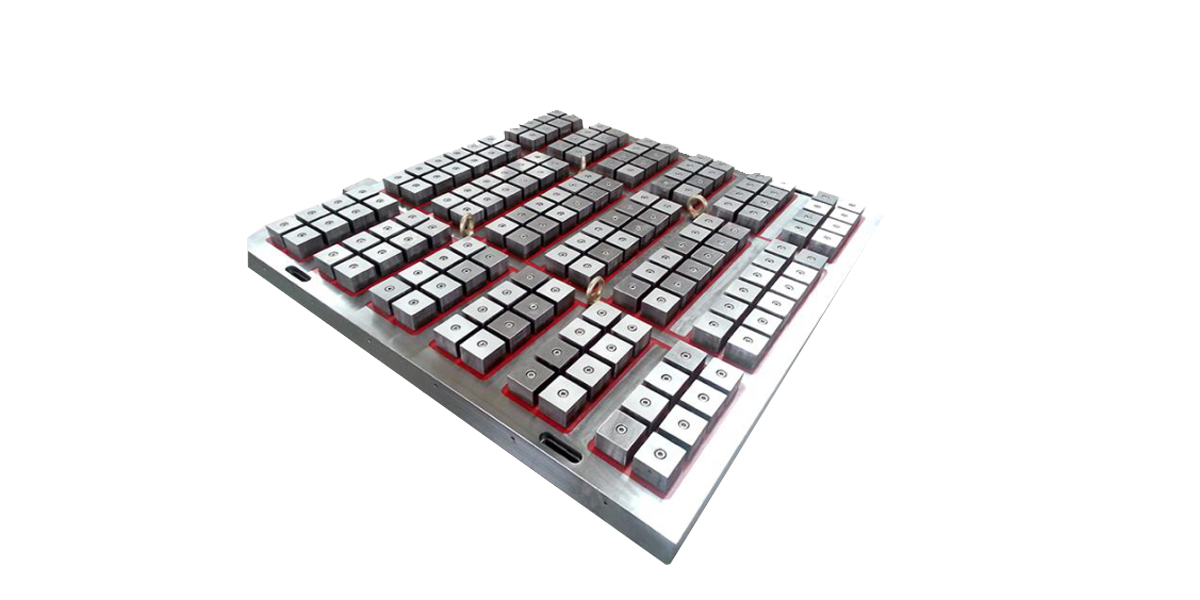
機器人電永磁抓手
悍威磁電研發生產的機器人電永磁抓手,適用于各種導磁性物料的吸附搬運,已被廣泛應用于搬運、碼垛、加工、裝配、等自動化工業生產中,為工業企業解決了用工難、效率低等迫切問題。
想了解更多關于電永磁在工業上各行業的應用,歡迎訪問我們的網站。